
The following article will provide some of the details required to get the Flight Coach system up and running on an Omnibus F4 v3 Pro flight controller and a Neo-M8N u-blox 8 GPS. Please refer to the Flight Coach website for general details on the installation and use of the system.
The Flight coach website gives detailed instructions on how to make the system work on the older Omnibus F4 v3 controller (NOT PRO) which has a slightly different layout. As these are getting difficult to get hold of I have put together this tutorial for those that would like to use the more readily available Omnibus F4 v3 Pro controller. This tutorial will provide some of the details needed to get it up and running for use with Flight Coach. It is not a step by step guide, but should hopefully help anyone wanting to try the Pro controller with Flight Coach.
The main difference between the Omnibus F4 v3 and Omnibus F4 v3 PRO flight controller boards are:
- Pro version has a built in BEC and can be run from a 2-4S lipo pack
- Onboard current sensor (not really of any use for Flight Coach)
- Uses JST-SH 1.0mm connectors (1×6 pin + 1×4 pin connectors required!) rather than servo pins.
When you purchase the PRO FC, make sure you also purchase the 4 and 6 pin JST-SH 1.0mm connectors required for this setup at the same time.
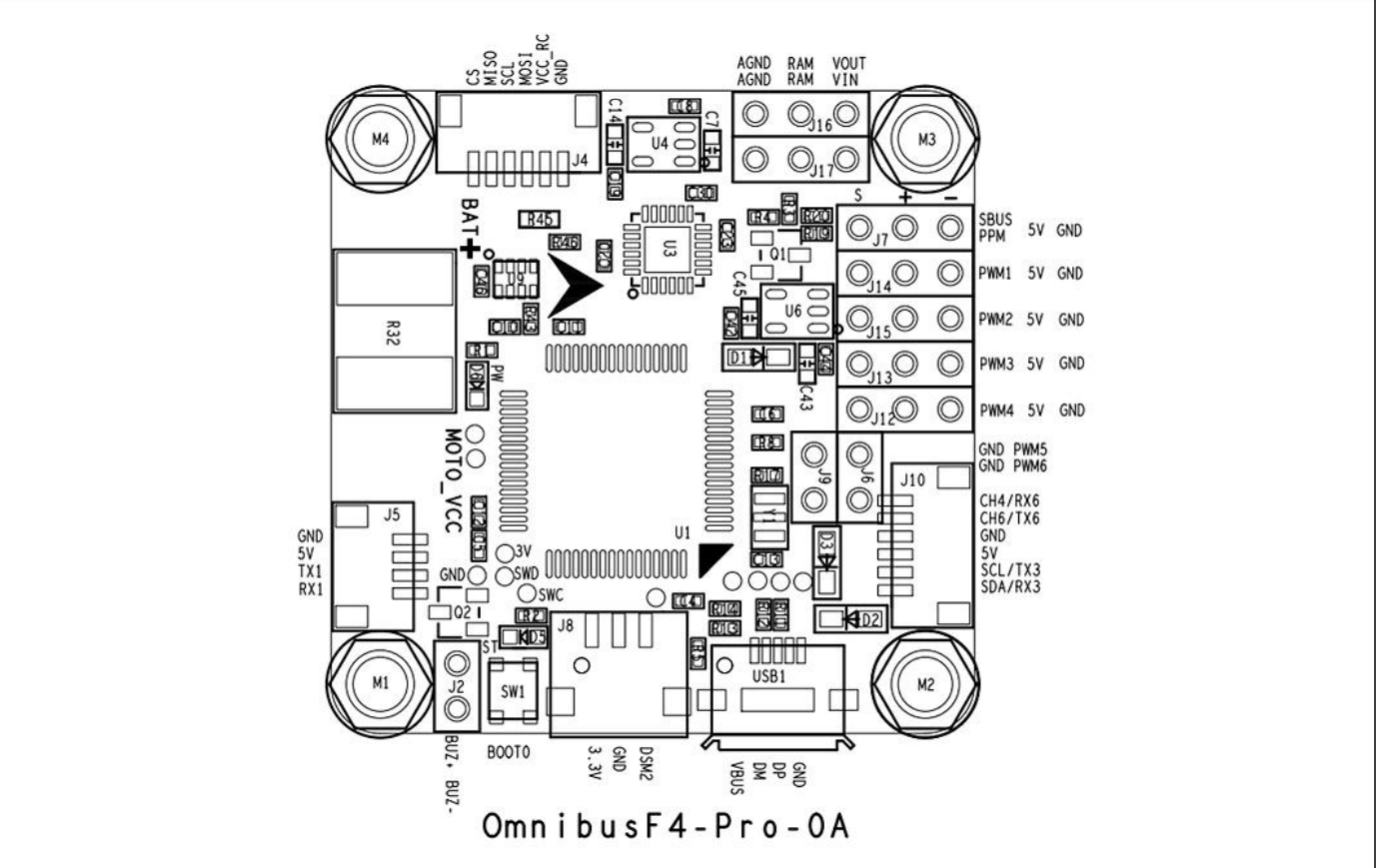
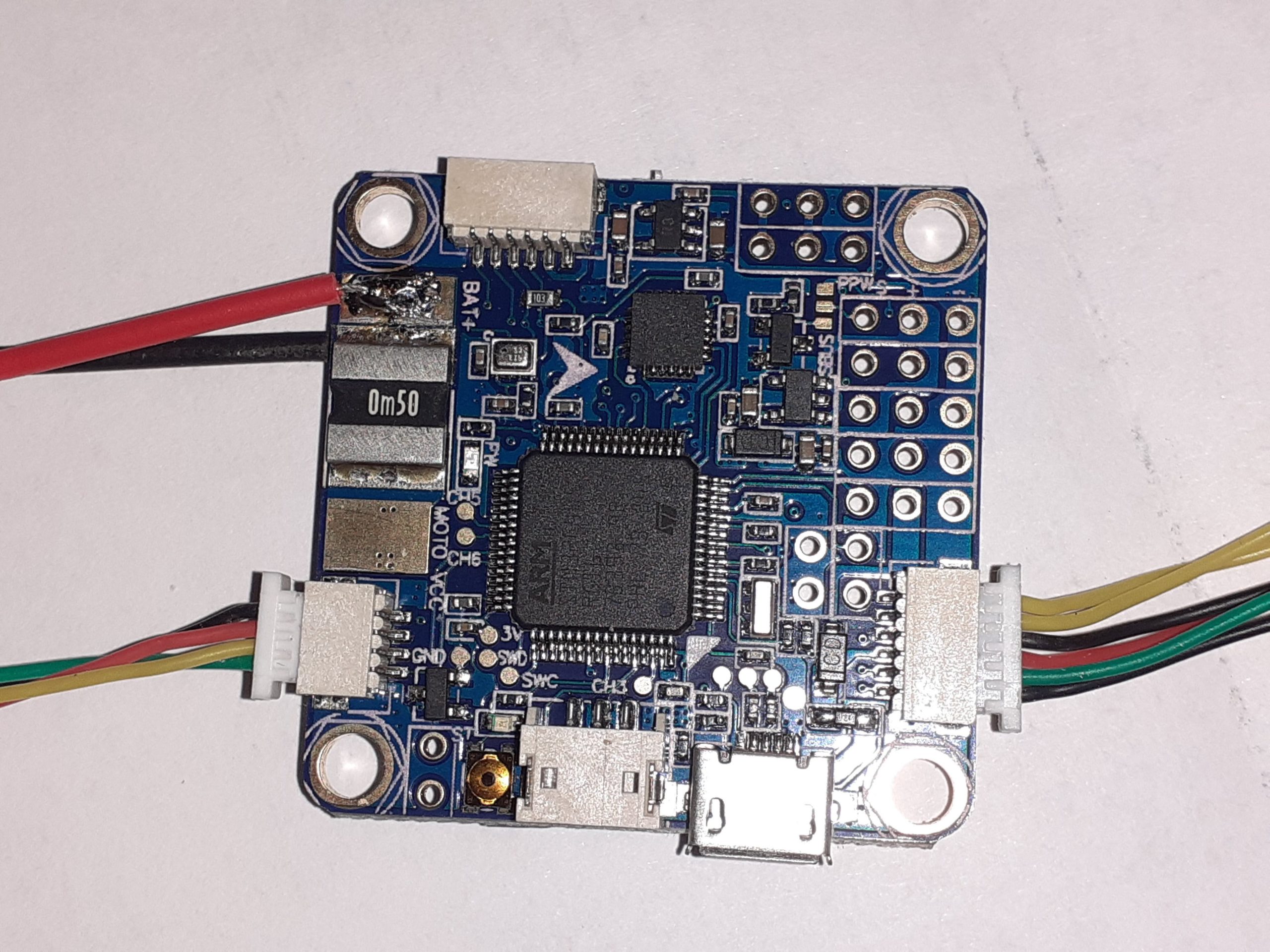
Connections to be used on the flight controller are:
| FC Connector | Description |
|---|---|
| J10 (6 pin) | GPS and compass |
| BAT+ pad | Input for 2-4s input. Use separate battery or connect it to the flight battery by tapping into the balance connector (keep to it to max 4S, but you only need 2S). |
| GND pad | Ground connection to battery (underside of the BAT+ pad) |
| J5 (4 pin) | HC-05/06 Bluetooth Module (optional) |
UBLOX M8N GPS Wiring
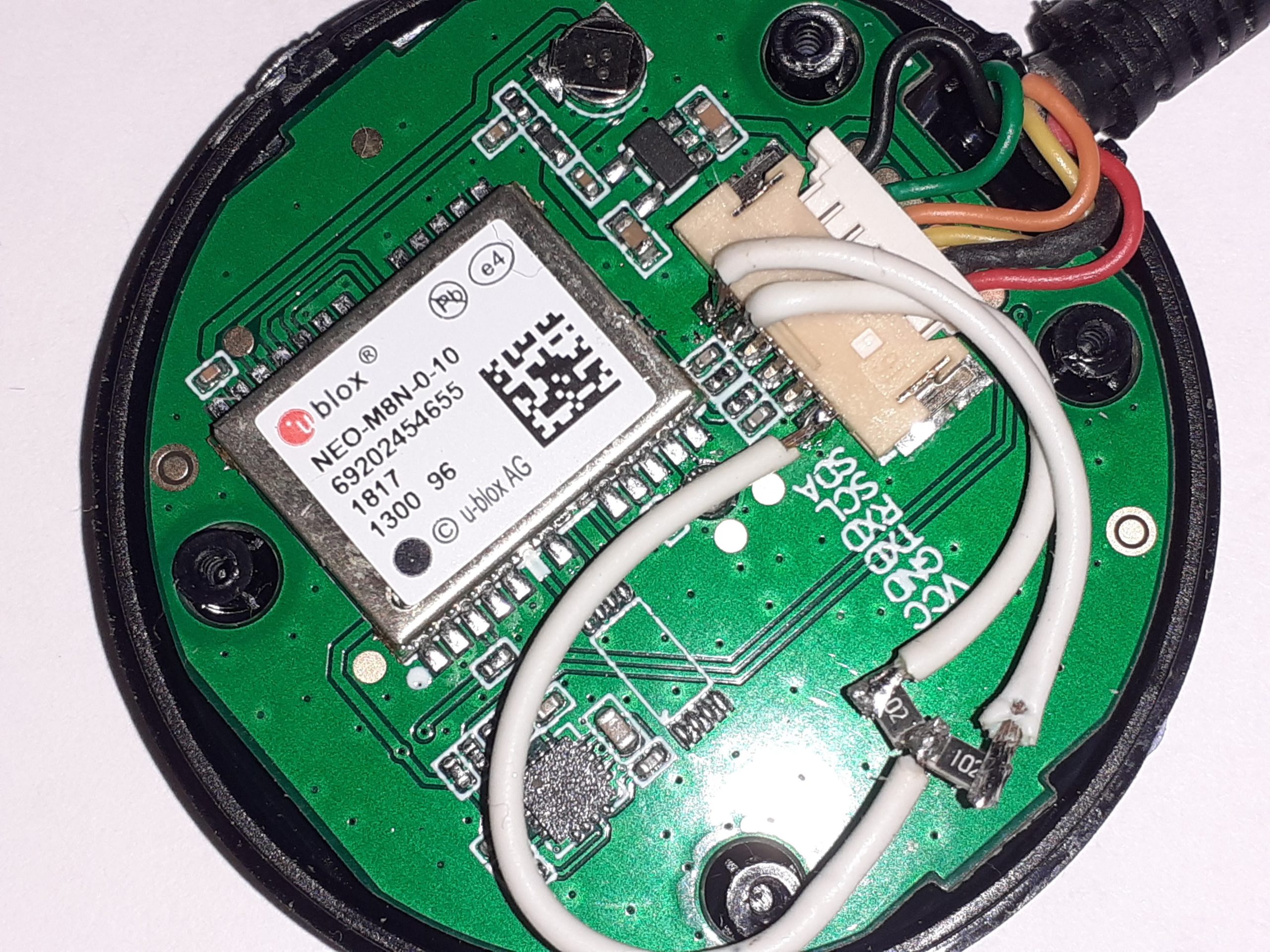
The UBlox NEO-M8N unit combines a GPS and compass and is an affordable and readily available unit. This unit can be found on most online stores selling flight controllers, or from Ebay, Amazon etc. The unit used here is often sold under the label ” BDS GPS” or “UBlox NEO-M8N for PIX PX4”. Any M8N GPS with the combined compass can be used as long as one makes sure the wiring is correct before adding power to the FC and GPS. It might be necessary to open up the GPS plastic casing to see what is what as the GPS board often labels the pins. If no labels are visible then refer to the documentation provided for the specific GPS unit you intend to use.

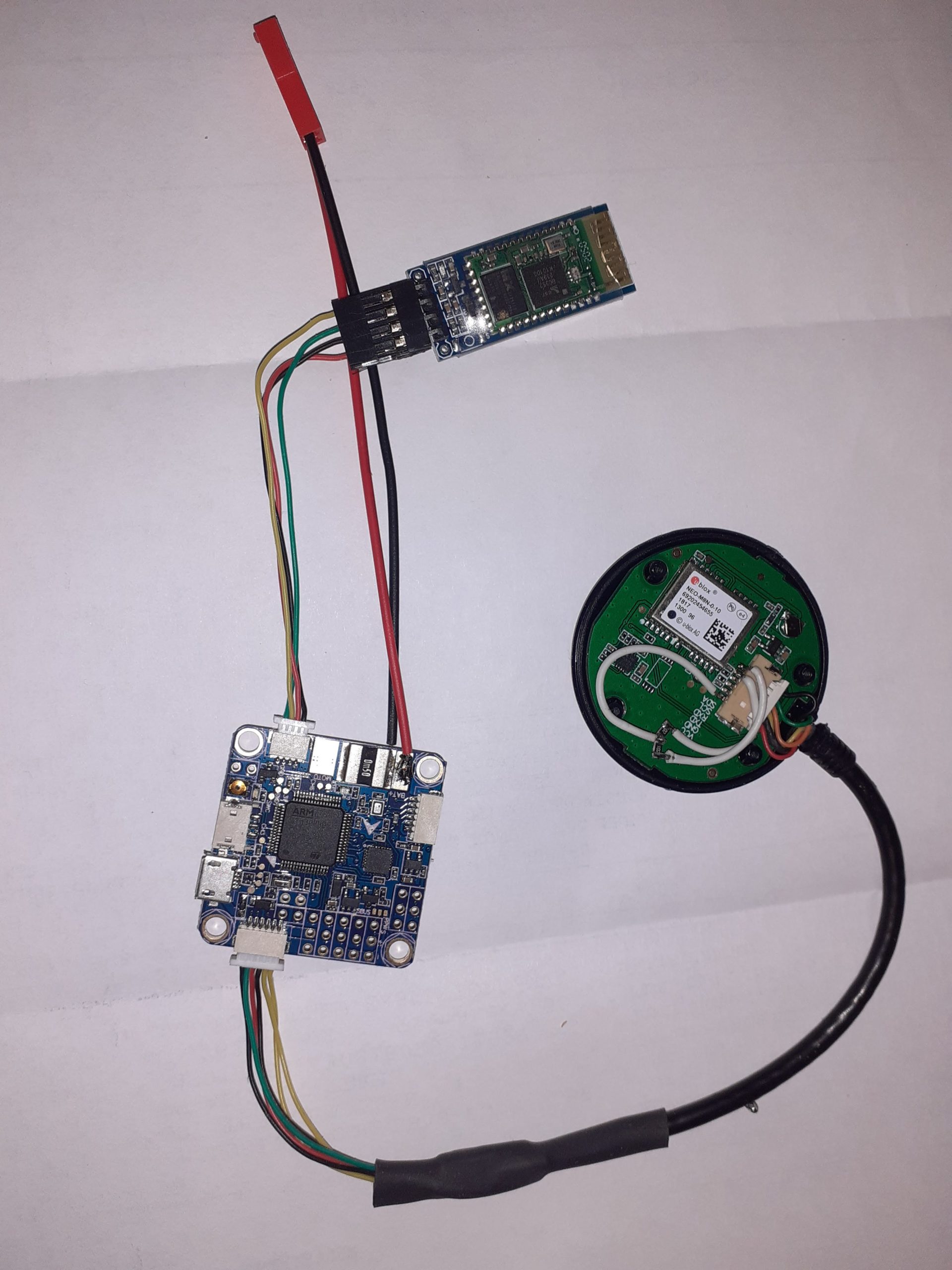
The wiring outlined below is based on the GPS as pictured above with the same wire colours and two connectors. Since this unit comes with 2.54mm spaced connectors it is necessary to change these to the JST-SH 1.0mm wires, usually by cutting and soldering on a new set of connectors. I have not found any M8N GPS’ that comes pre-wired for the JST-SH 1.0mm connectors.
| FC Pins (J10 – UART6) | UBlox GPS Pins |
|---|---|
| 5V | VCC (3.3v – 5.5v) – Red cable on 6 pin connector |
| GND | GND – Black wire on 6 pin connector |
| CH4/RX6 | TXD – Yellow cable on 6 pin connector |
| CH6/TX6 | RXD – Orange cable in 6 pin connector |
| SCL/TX3 | SCL – Green cable on 2 pin connector for compass |
| SDA/RX3 | SDA – Black cable on 2 pin connector for compass |
The compass module in the M8N GPS will not work out of the box when connected to the FC. This is because the I2C bus does not have pull-up resistors and a such the FC will not be able to detect the compass chip. Pull-up resistors will need to be soldered in place somewhere along the wire between the J10 connector and the connector inside the GPS. It is up to the end user to choose where he/she puts these two pull up resistors.
In the picture below one can see how I chose to add the pull-up resistors on the GPS side. This is a bit of a hack job but it works. The soldered wires and resistors will be secured to the PCB with some glue to make sure they don’t come lose during flight. This setup does not allow the original plastic casing to fit any more, but as I will mount the FC and GPS unit in a small 10×4.5cm 3D printed casing it is not an issue.
The principle is that a 1K resistor is added between SCL and VCC, and SDA and VCC. I used some 1206 sized SMD resistors, but one can use any type of resistor as long as it is a between 1K and 2.2K ohm. Some more info and pictures of various methods to achieve this can be found in this iNAV thread on github.com. The resistors can also be soldered somewhere along the wire if that is easier to accomplish as long as they added between the SCL to VCC and SDA to VCC wires.
See Update #2 at the end of the article if you want to use a GPS module which doesn’t need pullup resistors.
Ardupilot Software
Flight Coach requires the Plane firmware from ArduPilot software to be installed on your FC board. I have used the v4.1.4 firmware for the OmnibusF4Pro available from https://firmware.ardupilot.org/Plane/stable-4.1.4/omnibusf4pro/arduplane_with_bl.hex
The recommended version by FlightCoach can be found on https://www.flightcoach.org/wp-content/uploads/arduplane_with_bl.zip which also seems to work with the PRO card.
There are various tools that can be used to upload the firmware. The first time the firmware is uploaded it is recommended to use the DFU method together with the STM32 Cube Programmer available from ST. A detailed guide on how to perform the upload using the STM32 Cube programmer can be found on the Ardupilot site.
Please note that the FC board will need to be put into the DFU mode in order to upload the firmware. Press the DFU mode button while powering on the board in order to enter the correct mode.
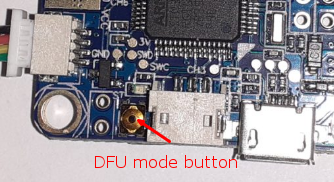
Once the board is in DFU mode, you should be able to connect using STM32 tool and upload the firmware. Once the new firmware is successfully uploaded, connect the board using Mission Planner or similar software.
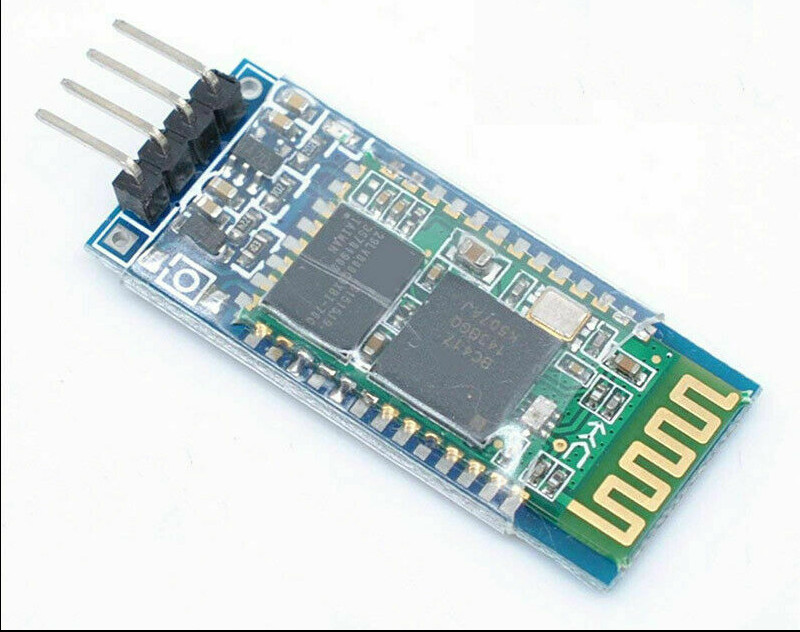
Bluetooth Module
A bluetooth module is not a requirement but makes life easier as you won’t need a laptop to calibrate the setup. If getting a BT module, please make sure you get a HC-05 or HC-06 module.
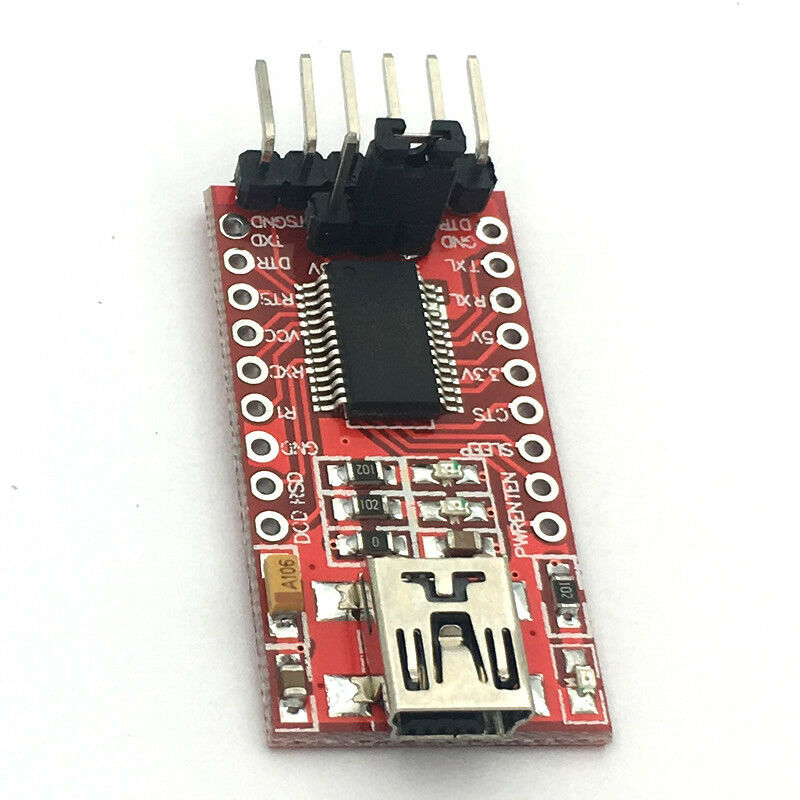
In addition to the HC-05/06 module one will need a device to help program it. This can be an FTDI, an Arduino board or other TTL serial adapter that offers 3.3v logic. I used a cheap USB to FTDI FT232TL adapter which can be found on ebay for very little money.
There are various firmware version for the HC-05 and HC-06 modules, and some of them have different AT command sets. There is no easy way to distinguish a HC-05 from a HC-06, so some trail, error and googling might be needed if you don’t know what you’ve got. The HC-06 module I got, listed a firmware version of 3.0-20170609.
You will also need a serial terminal software to issue the required AT commands once the device is hooked up. I recommend Putty on Windows and Linux, but any software capable of connecting to a serial port can be used as long as its sends a CR and LF control character when pressing the ENTER key. For Linux it defaults to only send CR control character, so to get the LF as well press CTRL+J before hitting enter! Connect using a baud rate of 38400 to start configuring the device.
A HC-05 module will need to be booted in AT mode by connecting the KEY pin to the VCC pin or holding down the button next to the EN pin. The HC-06 moduled does not need to be powered up in AT mode as it will power on as a slave device by default. Power the unit up using a 3.3v FTDI or other serial programming device and start setting the parameters.
To test if you have connectivity with the module, just type AT and hit enter. This should produce an output of “OK” or something similar. If nothing is returned, check the wiring to the adapter you are using and also try and see if it could be an AT mode issue. Some trail and error is to be expected!
I won’t go into details in configuring the bluetooth module, but to get my HC-06 module configured I used the following parameters to set the BT name as “mypilot” and serial port to 57600.
AT+NAMEmypilot
AT+UART:57600,1,0
To see which firmware version the unit has, issue AT+VERSION or AT+VERSION? and you should get a prompt with the installed firmware version.
Reboot the BT module and change the baud rate to 57600 in the serial software you are using. Then issue the AT command again to see if it responds. Next try and connect using BT on your mobile to see if the device name you specified in AT+NAME…. is available.
Wiring the BT module with the FC
| FC Pins (J5/UART1) | HC-06 Pins |
|---|---|
| GND | GND |
| 5V | VCC |
| TX | RXD |
| RX | TXD |
Ready to power on…
At this stage you are ready to try and connect to the FC using Mission Planner or similar software, either by a direct USB connection or using the Bluetooth module.
First thing that should be done is to upload the parameters found on the Flight Coach setup page for the Omnibus F4 V3 card. I have used the same file without issues on the PRO FC.
- Download the parameters file from Flight Coach for the Omnibus FC
- Connect to the FC in Mission Planner
- Go to Config -> Full Parameter List
- Click on Load from file and select the downloaded parameters file
- When the file has loaded, click on Write Params
With the parameter set, the next step is to calibrate the compass and accelerometer. To complete these steps it is best to have the FC and GPS mounted on whatever you plan to use in your model. This could be a small piece of thin plywood, balsa or a 3D printed casing, whatever you find most suitable.
- Start with setting ARMING_REQUIRE in Config -> Full Parameter List to to 1. Remember to press Write Params!
- Go to Setup -> Mandatory Hardware -> Accel Calibration and click on Calibrate Accel.
- Follow the process as Mission Planner tells you as you go along. It always starts with the FC level.
- With the Accelerometer calibration complete, proceed to Setup -> Compass
- Detailed instructions on how to do the compass calibration can be found on the Ardupilot site, but one basically just need to move the unit around all its axis a few times. This is the initial step as outlined by the Ardupilot documentation:
“Hold the vehicle in the air and rotate it so that each side (front, back, left, right, top and bottom) points down towards the earth for a few seconds in turn. Consider a full 360-degree turn with each turn pointing a different direction of the vehicle to the ground. It will result in 6 full turns plus possibly some additional time and turns to confirm the calibration or retry if it initially does not pass.” - With the calibration complete, click on the Reboot button.
- Reconnect and go to Config -> Full Parameter List and set ARMING_REQUIRE to 0. Remember to click Write Params!
- Slot in a FAT32 formatted SD card and go outside and run around on your lawn a few rounds to see if the unit works. Make sure the GPS light is blinking if using the BDS GPS, which indicates GPS lock. Hopefully it should record a log file to the SD card which can be uploaded to the Flight Coach site and rendered in the viewer. If this works you can mount it in your model and take it to the field for a test.
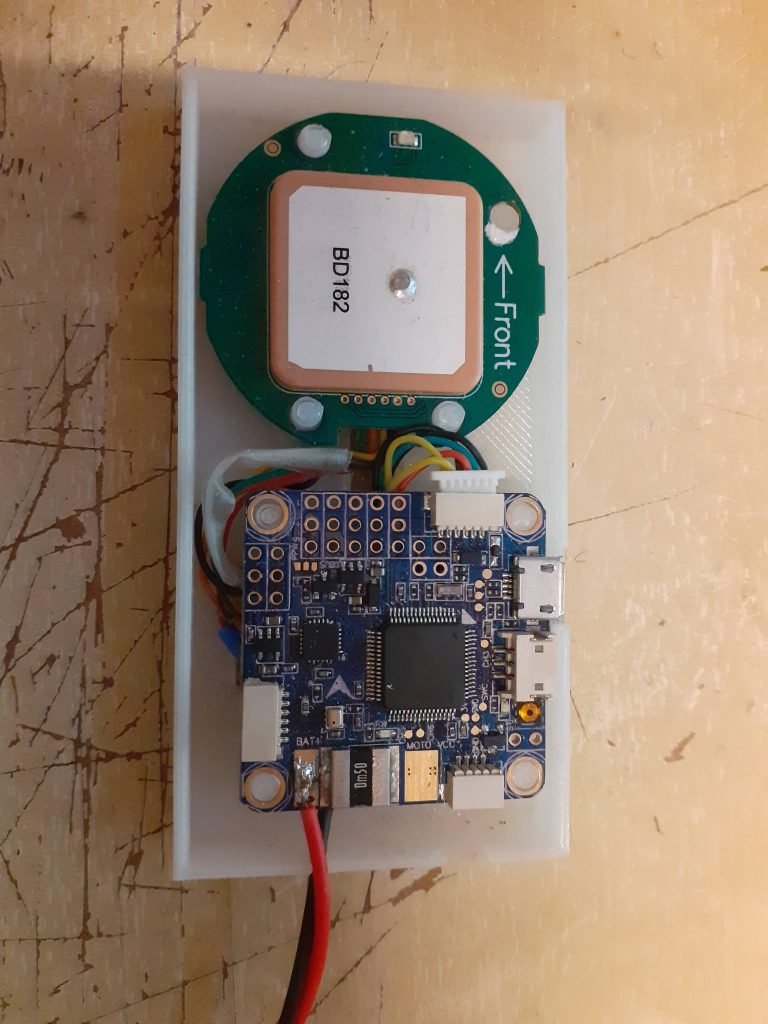
Update #1 – Flight tested
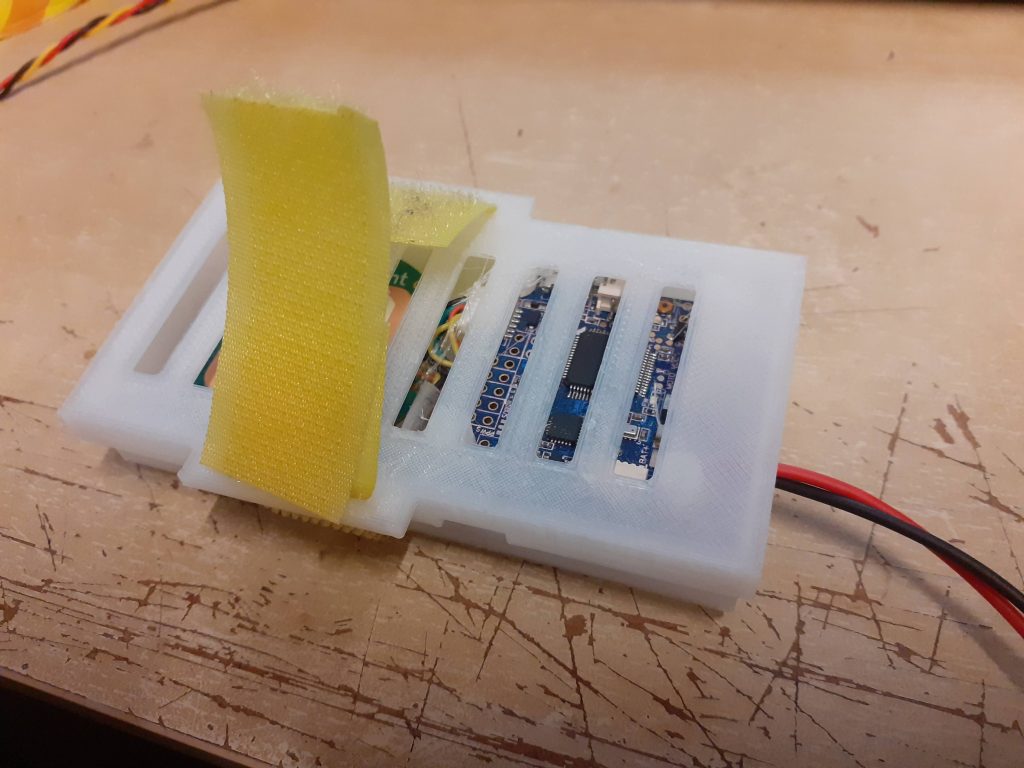
The setup has been tested and is working as expected. Had three flights which logged data without any issues. I have also put the controller and GPS into a 3D printed case. If you would like to use the same case, the STL file can be found below.
Update #2 – GPS
Arnstein Solberg has confirmed that the Holybro M9N GPS can be hooked up without the need to add pull resistors. The connector will still need to be changed as it comes with 1.25mm spaced connctor.

I believe the Beitian BN-880 GPS & Compass Module can also be hooked up without any needs for pullup resistors (I’ll get this confirmed some time in the near future).

If you find error/mistakes/mishaps/bugs in this article, please feel free to drop me a note via email or Facebook.
Happy flying!!!